双目视觉的对极几何
对极几何是什么?
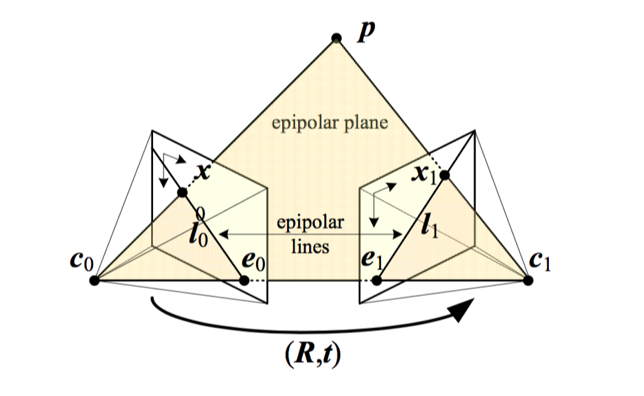
对极几何是相机在两个不同的位置生成的两幅图像,其拍摄位置和生成图像之间存在特殊的几何关系。其基本几何模型如下:
对极几何的作用
- 解决立体匹配的问题,这里把C0和C1想象成两个相机,各获得一副图像,图像的内容会存在一定的约束关系,依靠这种关系,我们可以确定物体的深度
- 解决相机位姿与拍摄点的相对位置问题。把C0和C1想象成一个相机在两个不同的位置获得的两幅图像,根据约束关系,可以推导出相机的位姿。
双目主要利用第一条。
基本概念
- 极点(Epipoles):两个相机得基线与两个成像平面得交点,如上图中的e0、e1
- 极线(Epipolar Lines):空间中点在成像平面上的投影点与极点的连线,如上图中的l0、l1
- 极平面(Epipolar Plane):空间中的点与两个相机的光轴中心点所组成的平面,如上图c0、c1、p所在的平面
对极约束
假定相机参数已知,那么对于空间中P点,它将和两个相机的中心点O1和O2,唯一确定对极几何的几何关系,极点、极线、极平面都将确定,而对极约束描叙的就是:在平面1上成像为p的所有空间点,其必定投影在平面2的极线上,反之亦然。
双目相机获得深度图的原理
双目相机获得深度图的原理
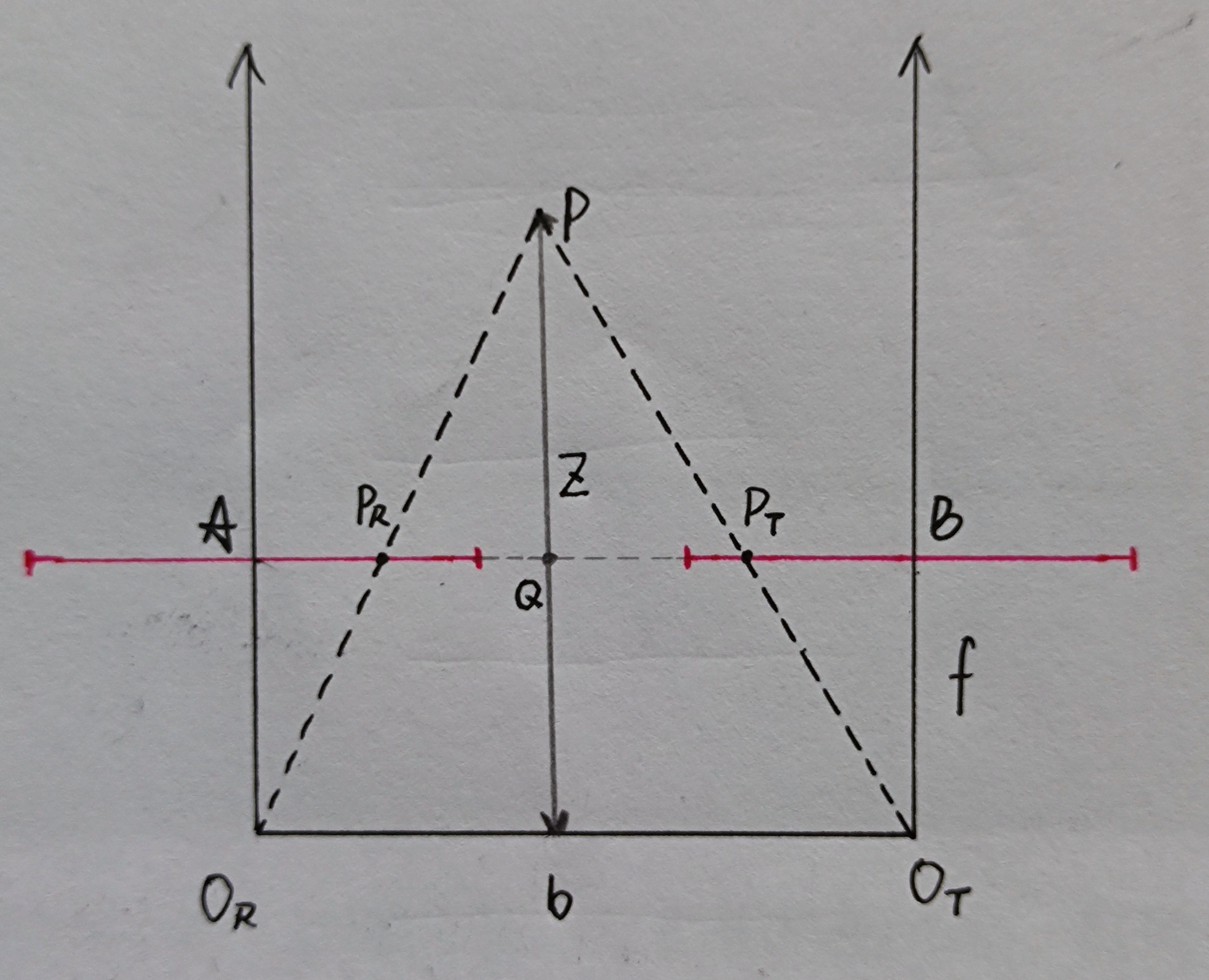
如图,可抽象为双目相机成像的鸟瞰图,$O_{R}$与$O_{T}$分别为左右相机的光心,红色线为相机CCD,$A$、$B$为相机CCD的中点,设相机CCD的长度为$L$,物体P在左右相机的CCD上的像点分别为$P_{R}$、$P_{T}$,像点距离CCD左端的距离分别为$x_{R}$、$x_{T}$,相机的焦距为$f$,相机光心的距离为$b$,求物体的距离$Z$
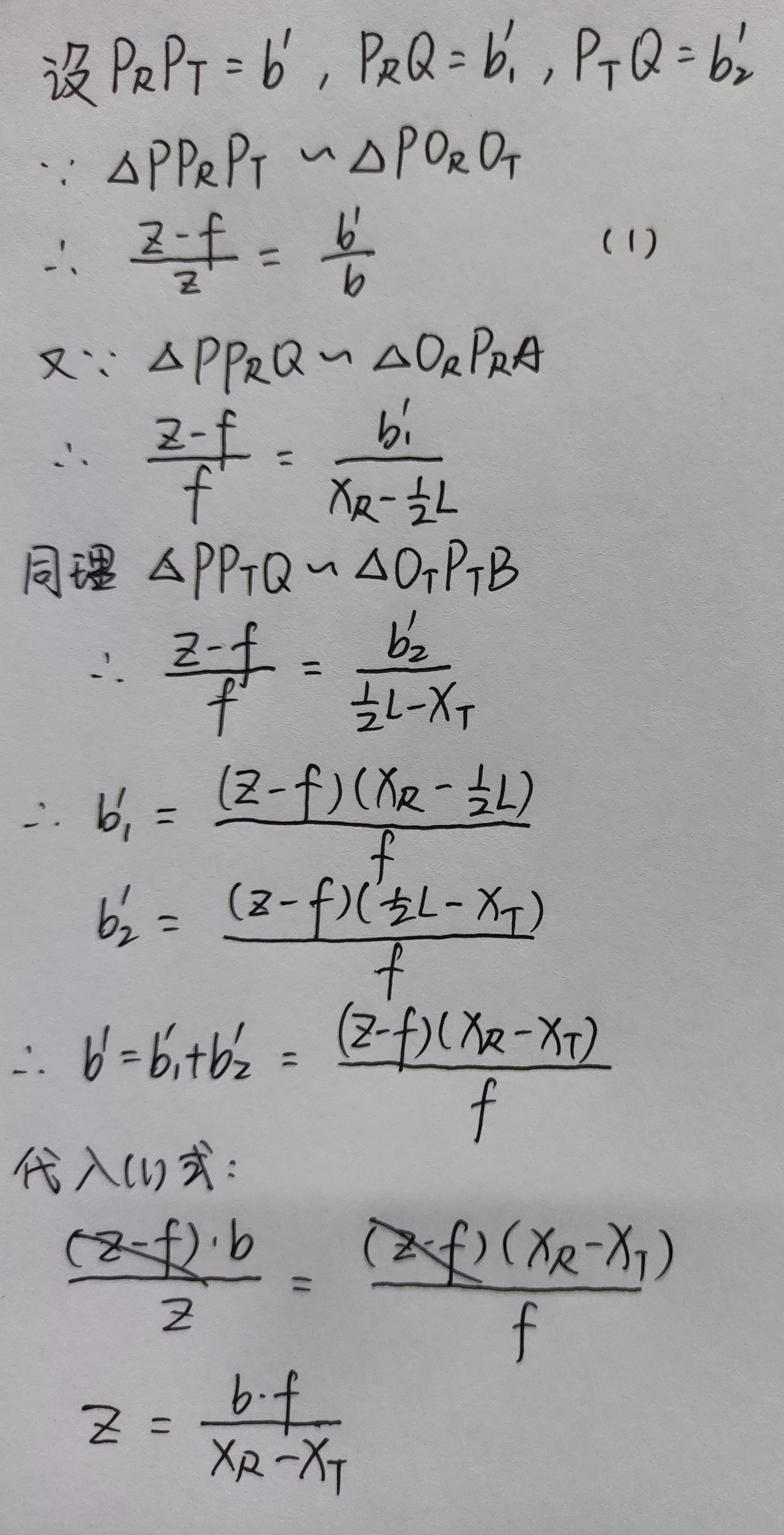
视差:
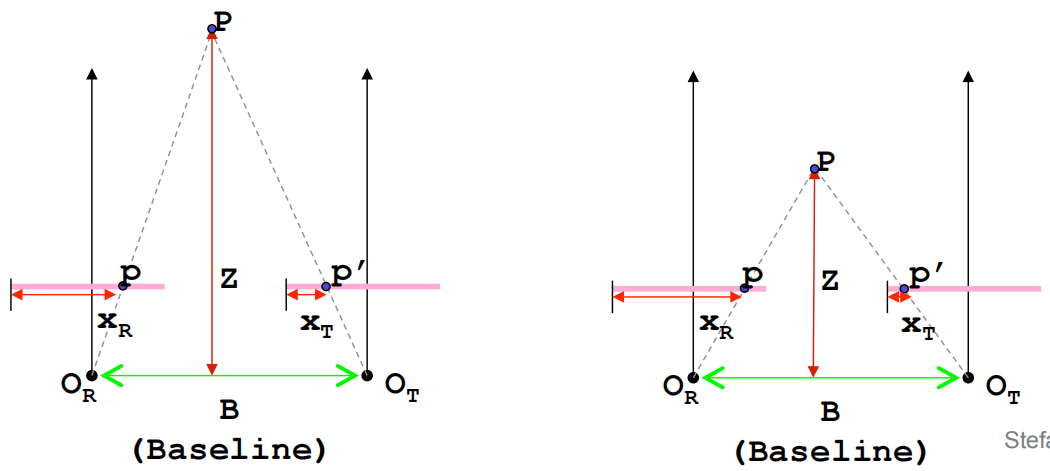
物体越近,视差越大;物体越远,视差越小。
关键矩阵
双目相机获得的图像存在约束关系,这种约束关系就是靠这三个关键矩阵来描述的:本质矩阵、基础矩阵、单应性矩阵。它们可以建立两个视图公共点之间的坐标联系,或者完成公共点之间的坐标转换。它们就像立体视觉双视图之间的桥梁,让彼此紧密相连,形成一个整体,才算有了立体视觉系统的概念。
本质矩阵和基础矩阵
变量说明:
- d1、d2为深度,是一个标量
- K1、K2为左右相机的内参
- R、t为旋转和平移矩阵
- p1、p2为图像坐标系
- x1、x2为像素坐标系
设空间点p在左相机坐标系下的坐标为P,则在右相机坐标系下的坐标为RP+t;在左右像平面上的投影为p1和p2,则:
等号左边的p齐次坐标,如果对空间点也取齐次,即将空间点归一化到$Z=1$的平面,d就变成了1,上式变成:
将矩阵K移到等号左边:
设:
则:
两边左叉乘 t :
其中,
所以:
两边左乘$x_{2}^{\mathrm{T}}$:
左边显然等于0,则:
其中的$t\times R$就成为本质矩阵,用E表示:
也可以记为:
其中$t\verb!^!$为t的反对称矩阵。
将(1)式代入(2)式中,可得:
即:
其中的$K_{2}^{\mathrm{-T}}t\verb!^!RK_{1}^{-1}$称为基础矩阵,用F表示:
单应性矩阵
直接将左视图像素坐标转换到右视图像素坐标。特定条件是同一平面。表达式:
单应性矩阵不仅可以描述同一平面的像素点之间的关系,而且同一个平面在任意坐标系之间都可以建立单应性变换关系。比如影像坐标系与影像坐标系之间,世界坐标系和影像坐标系之间,如下图所示:
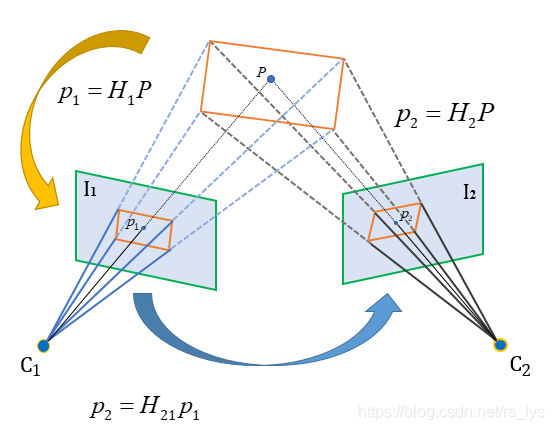
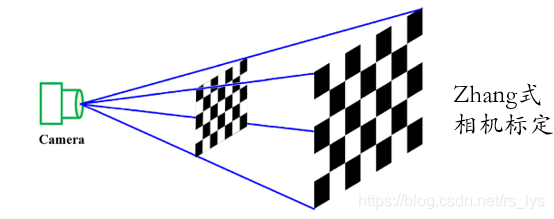
在双目立体视觉内,单应性变换是张式相机标定法的理论基础,纯平的标定板平面和影像平面存在单应性变换关系,同时它们存在世界坐标系到影像坐标系之间的投影变换关系,两个关系对等即可解出相机的内外参数。
参考
立体视觉入门指南(2):关键矩阵(本质矩阵,基础矩阵,单应矩阵)
(3)式中
是为什么呢?
- t叉乘x2的结果向量必定垂直于x2
- x2的转置必定与这个结果向量垂直
- 所以结果为0